ConeBot Autonomous Cone Collection Robot
Team project in Electromechanical Systems Design course at Carnegie Mellon University, 2023. My contributions are emphasized below.
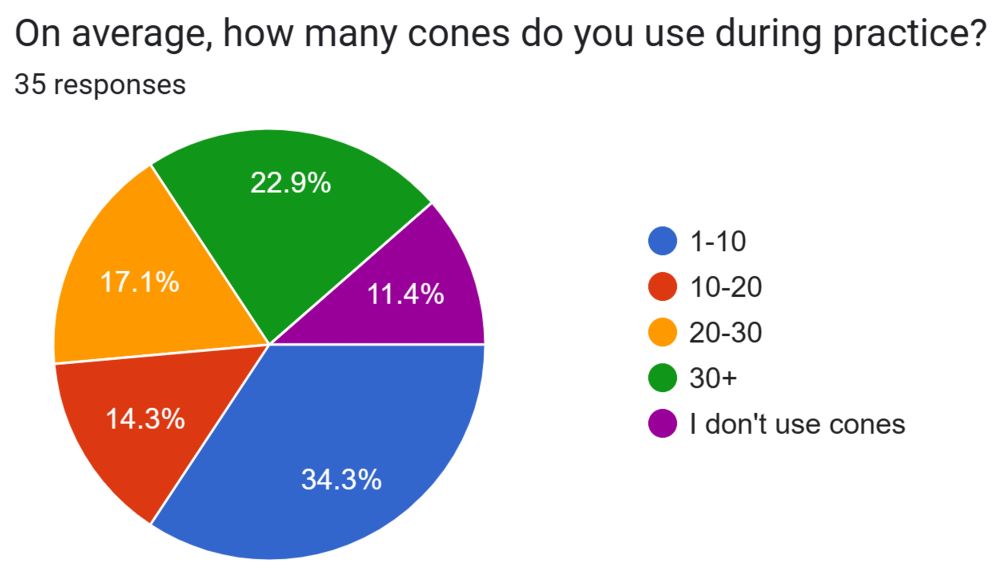
Cones are commonly used in sports practices for drills and demarcation; however, retrieving cones after practice can be a nuisance. Coaches we surveyed cited pain points such as bending over to pick up cones, locating cones over large areas, time spent picking up cones, and organizing the cones. The purpose of this project was to build a robot that would autonomously pick up cones.
Based on consumer outreach, we established target specifications for the robot:
- Accommodate standard, off-the-shelf cones
- Carry at least 10 cones at a time
- Work on several different terrains
- Take no more than 20 seconds driving to and picking up a cone
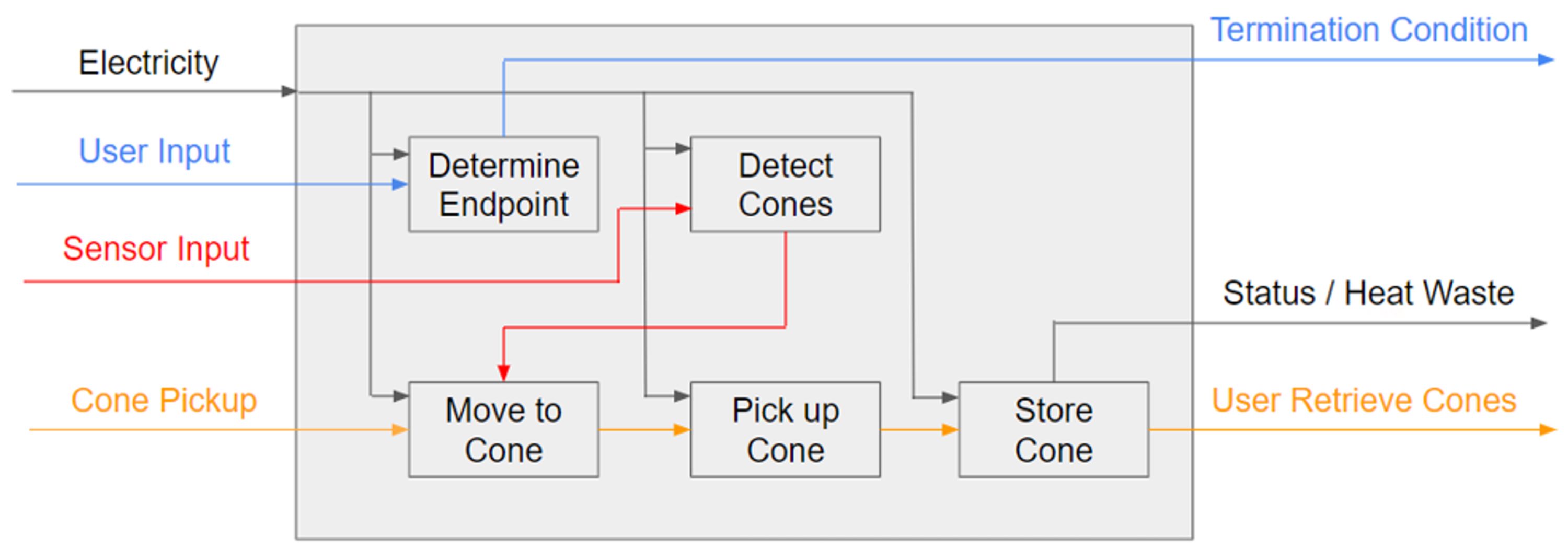
We performed a functional decomposition, breaking our robot down into 5 different subfunction, and diagramming their interactions. For each subfunction, we conceptualized possible solutions and created full-system concepts by combining a solution from each subsystem. The best full-system concept was identified through screening and scoring matrices.
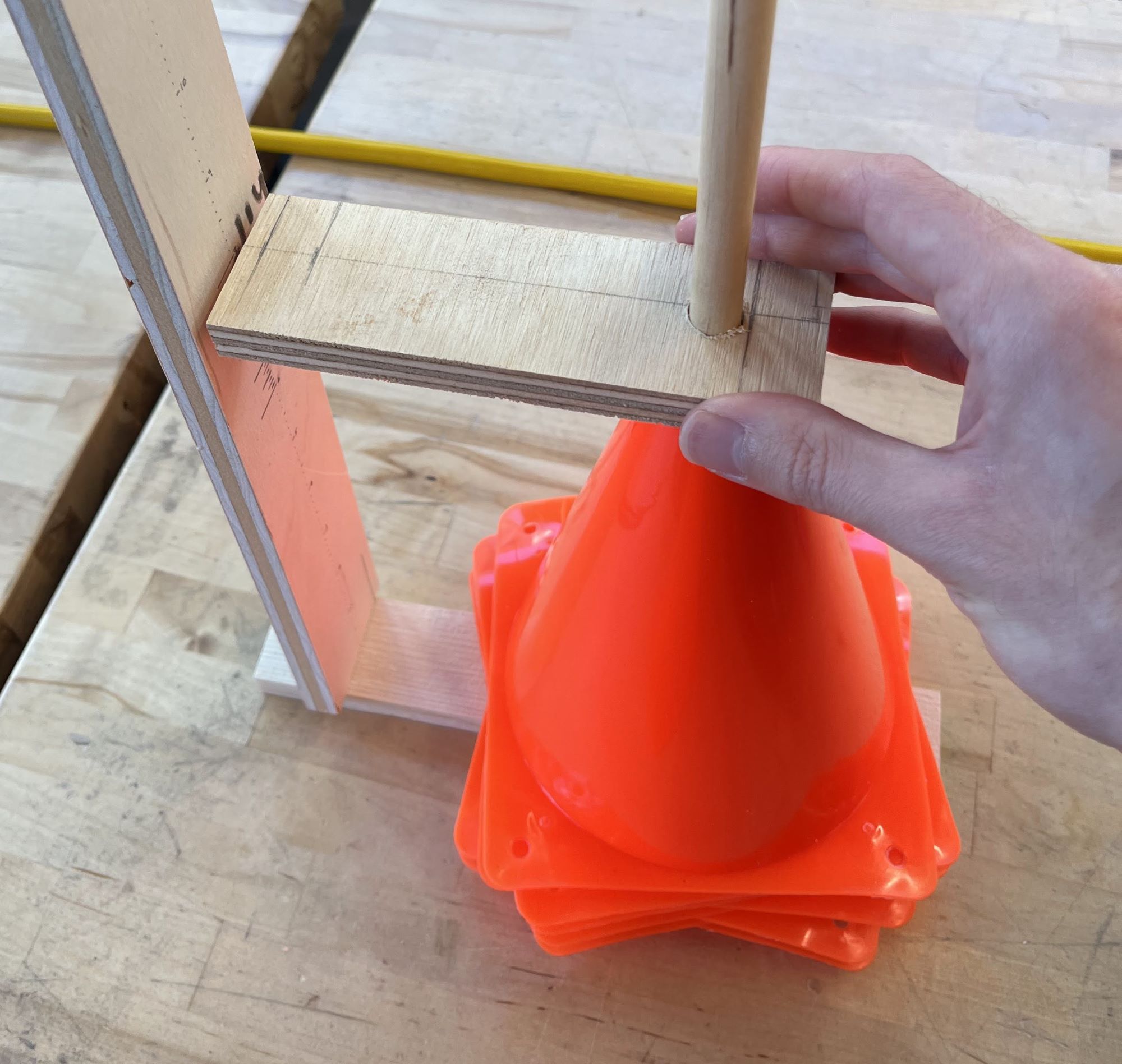
We performed many tests to inform design, such as one which measured how high cones stacked and therefore how much storage space was needed on the pickup arm. These tests informed the design of our first prototype.

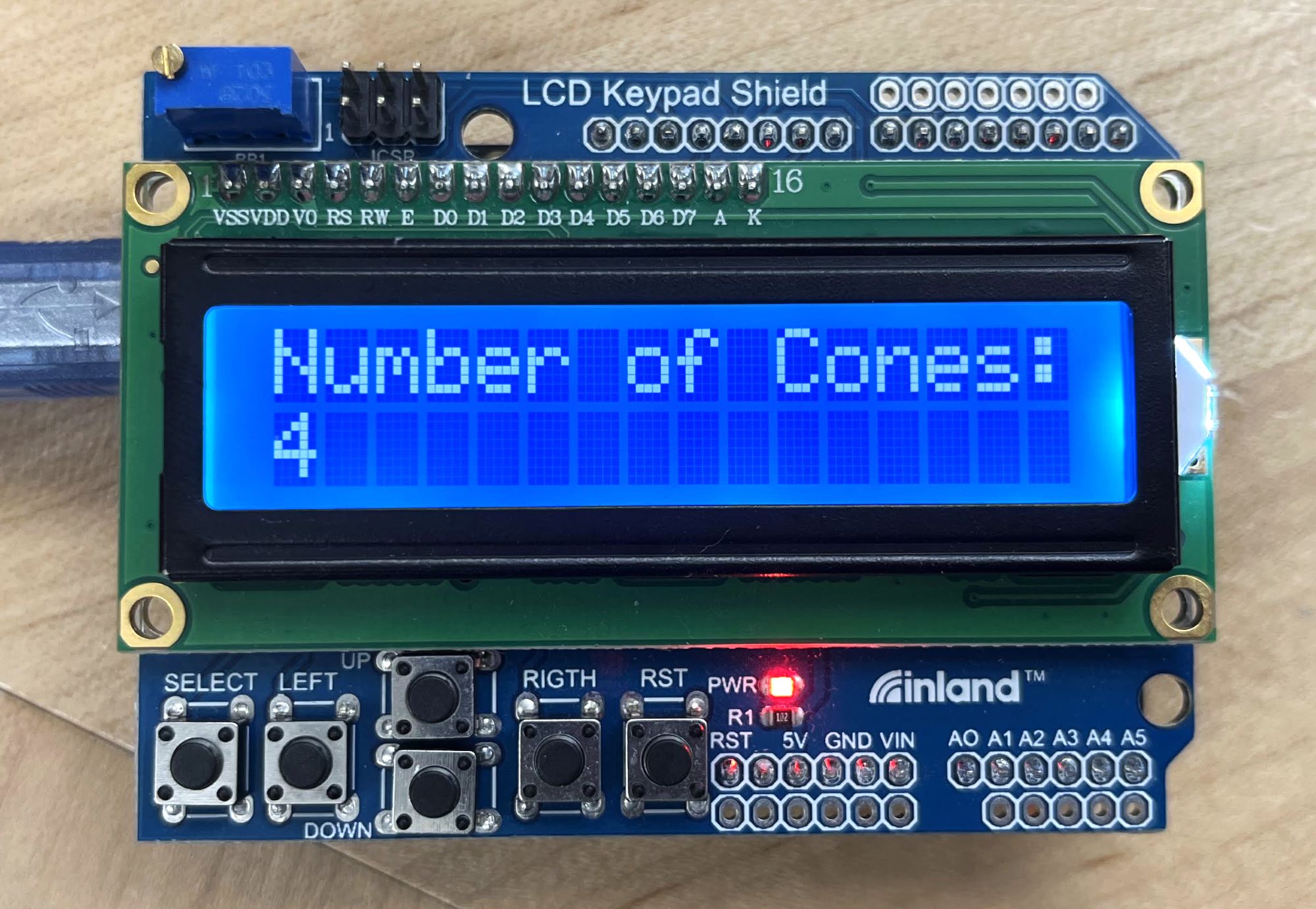

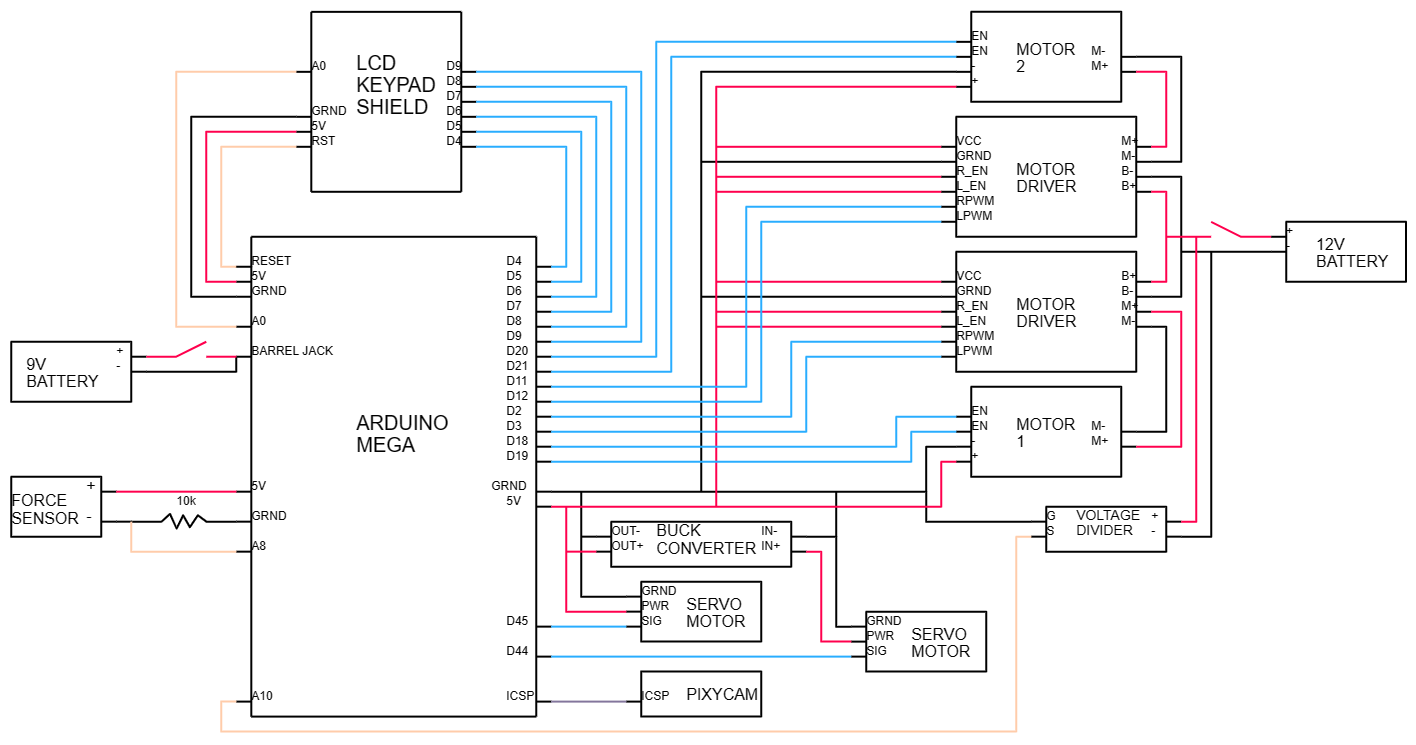
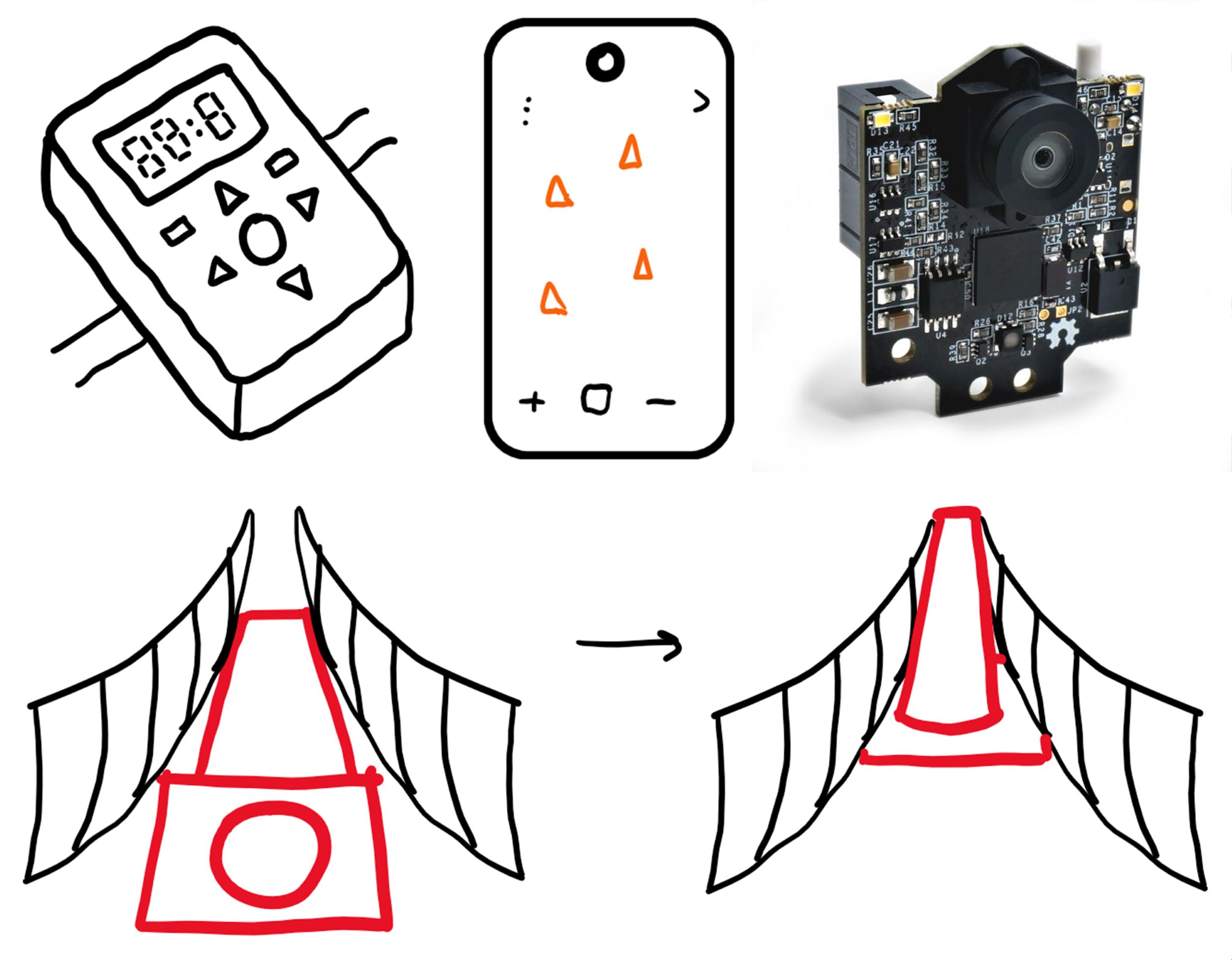
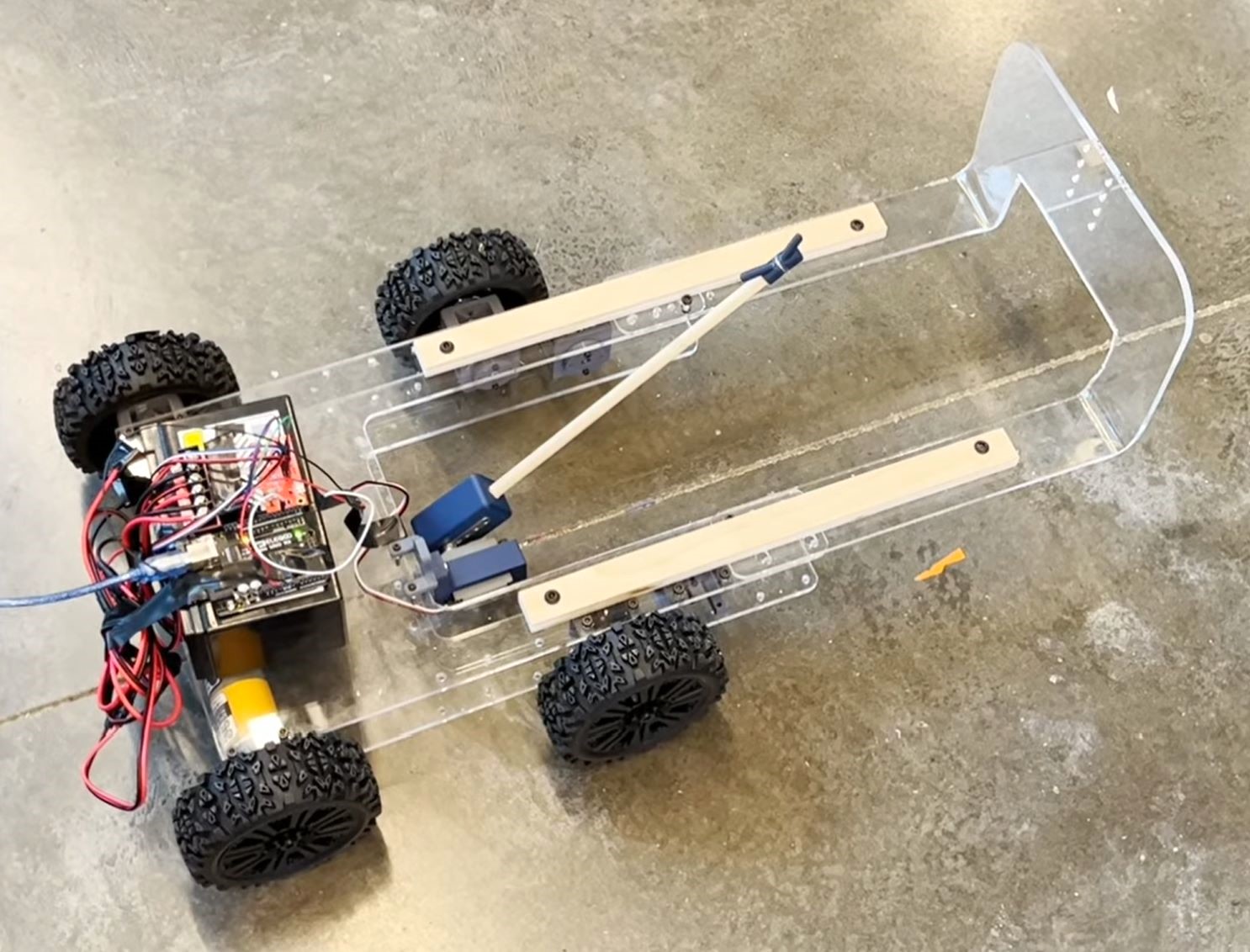
We improved each subsystem based on what we learned from the first prototype. My main contributions to the final prototype included the user interface and sensors. The user interface was programmed for Arduino. Buttons below the screen were used for input. Inputs included the number of cones for the robot to pick up, terrain, and size of collection area. A force sensor mounted to the pickup arm was used to detect if a cone was successfully picked up.
The final prototype robot was designed in SolidWorks and built with 3D printed, laser cut, and off-the shelf components and wired based on a circuit diagram that I drew.